Electrical
Power Connectivity
First of all, the robot needs power to run.

Signal Processing
Once the robot is powered, we can take care the input and output signals

Simulation
During the wiring process, we burned a Beaglebone Black mainboard; therefore, we make some simulations before wiring to avoid burning another BBB
Simulation for Controlling Five DC Motors
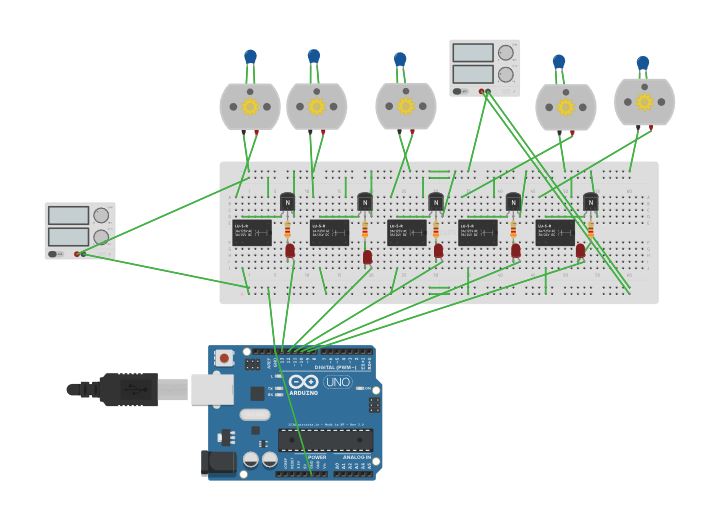
You can access the Simulation for Controling 5 DC Motors here
Simulation for Analog Inputs
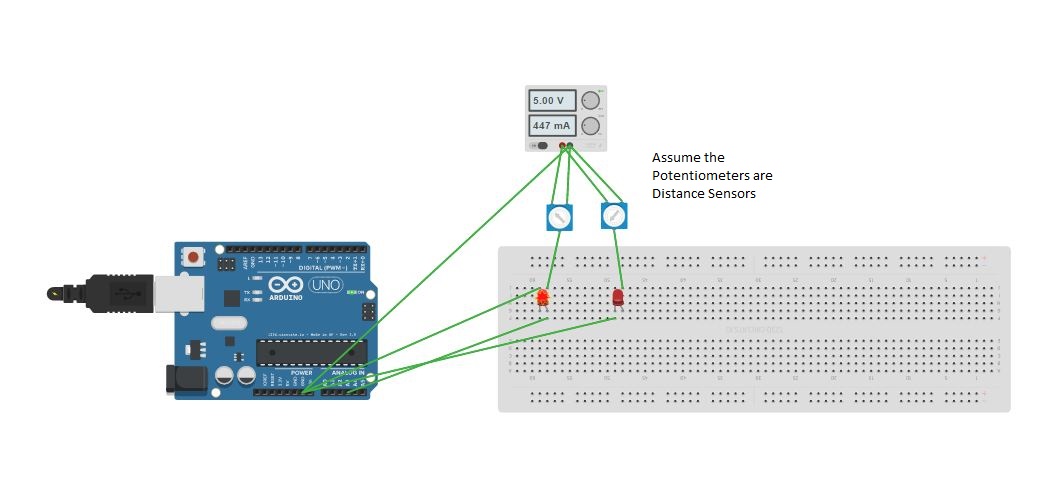
Click here to see the simulation
Pin Assignment on BeagleBone Black
Analog Inputs Diagram
